Evidence
第一批可展示成果已經足夠說清產品價值。
交通長尾事件先跑通訓練鏈路,非交通基建場景用 display / segmentation gate 保持質量邊界。
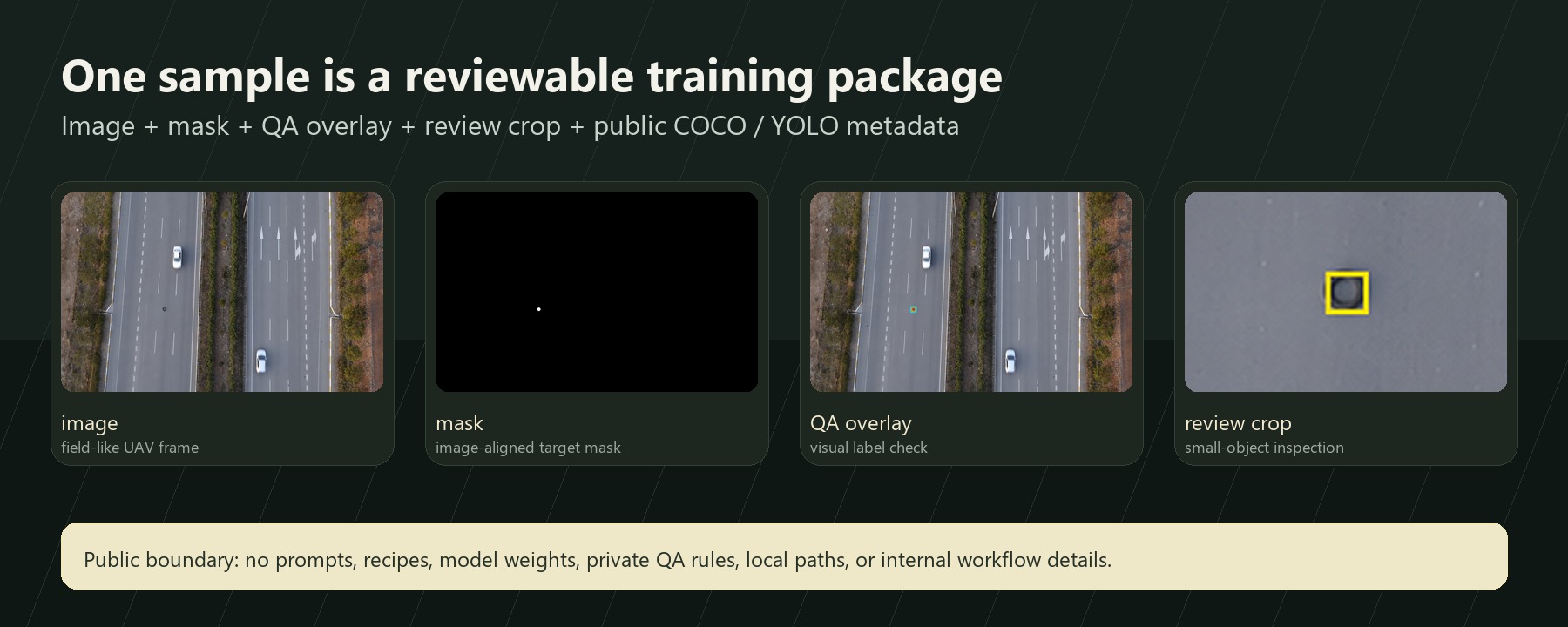
Public preview evidence panel:保留 final image、mask、QA、hard negative 的完整證據鏈。
不是 demo 圖,而是一條可運行的資料工廠線。
本地 active index 已收錄 4,285 張圖像;CEO 包複製 2,013 張可匯報/可追溯圖像。內部生產池仍在擴張,目標是 5,000+ UAV 長尾巡檢圖像。
第一批可展示成果已經足夠說清產品價值。
交通長尾事件先跑通訓練鏈路,非交通基建場景用 display / segmentation gate 保持質量邊界。
Public preview evidence panel:保留 final image、mask、QA、hard negative 的完整證據鏈。
Lost tire 是第一條真正跑通的 validated lane。
這不是只看圖片像不像,而是連同 mask、COCO/YOLO、QA overlay、validator、smoke train 一起驗證。
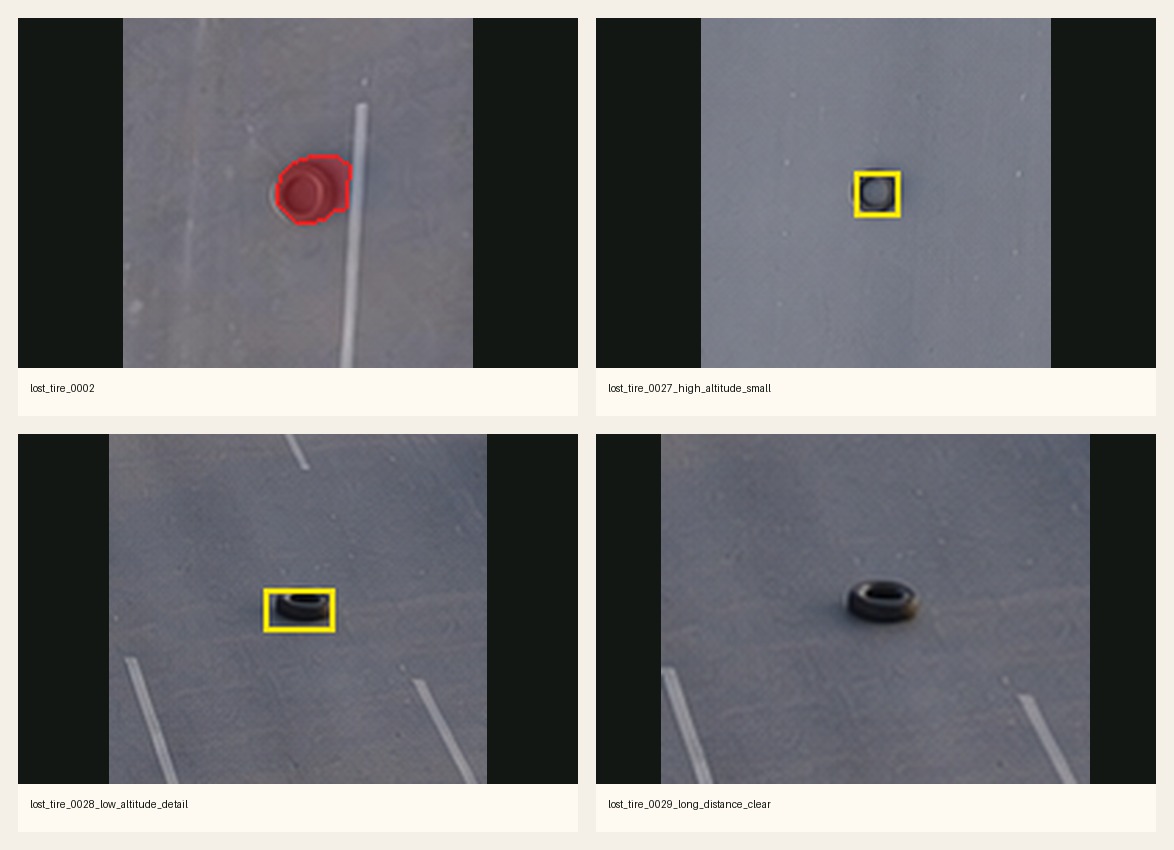
ROI detail:把小目標放大給 CEO 看,避免在全景 highway 圖中看不到事件。
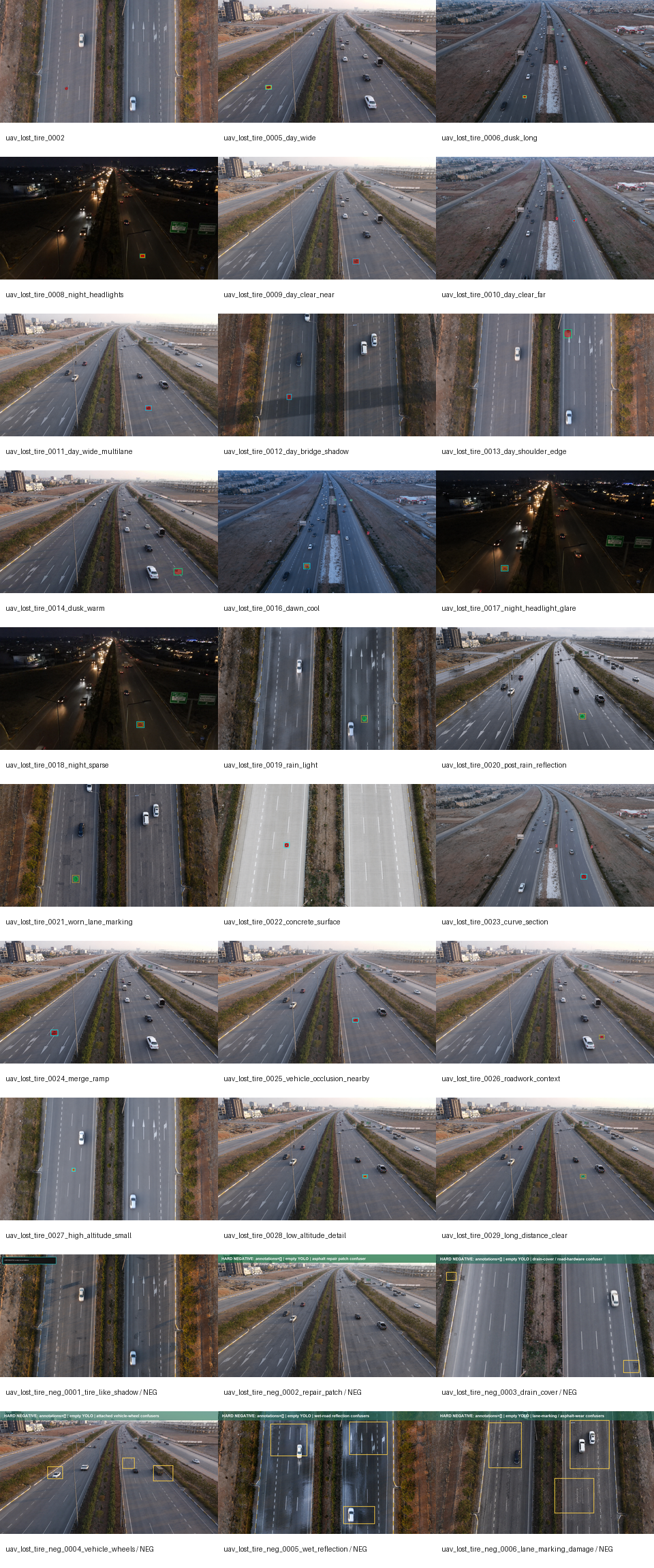
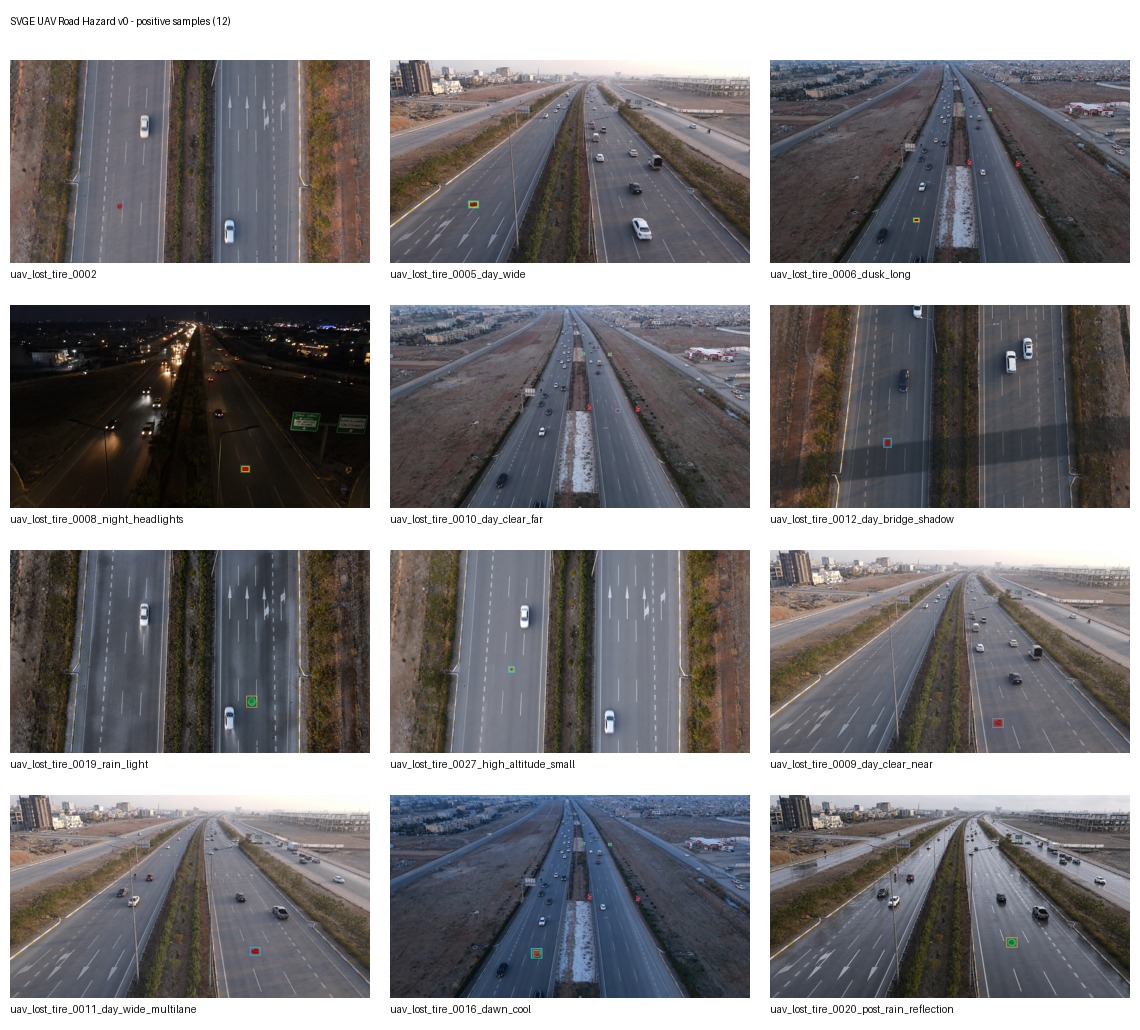
日間、夜間、雨後、遠距、高空、小尺度,覆蓋 UAV 真實巡檢尺度。
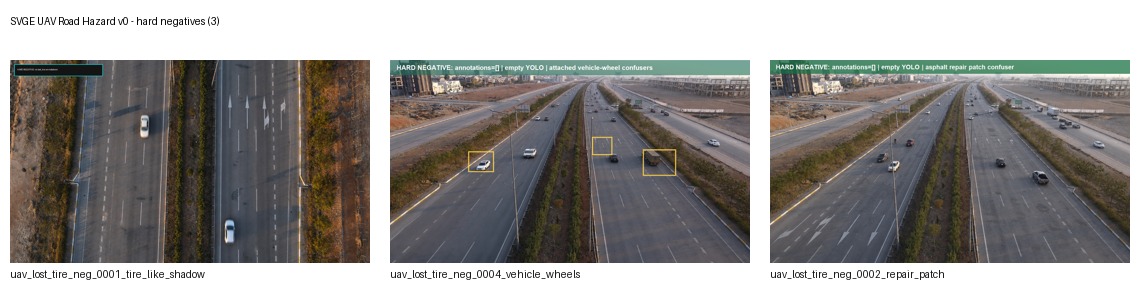
不是只生成目標,也建 tire-like shadow、wet reflection、lane damage 等干擾項。
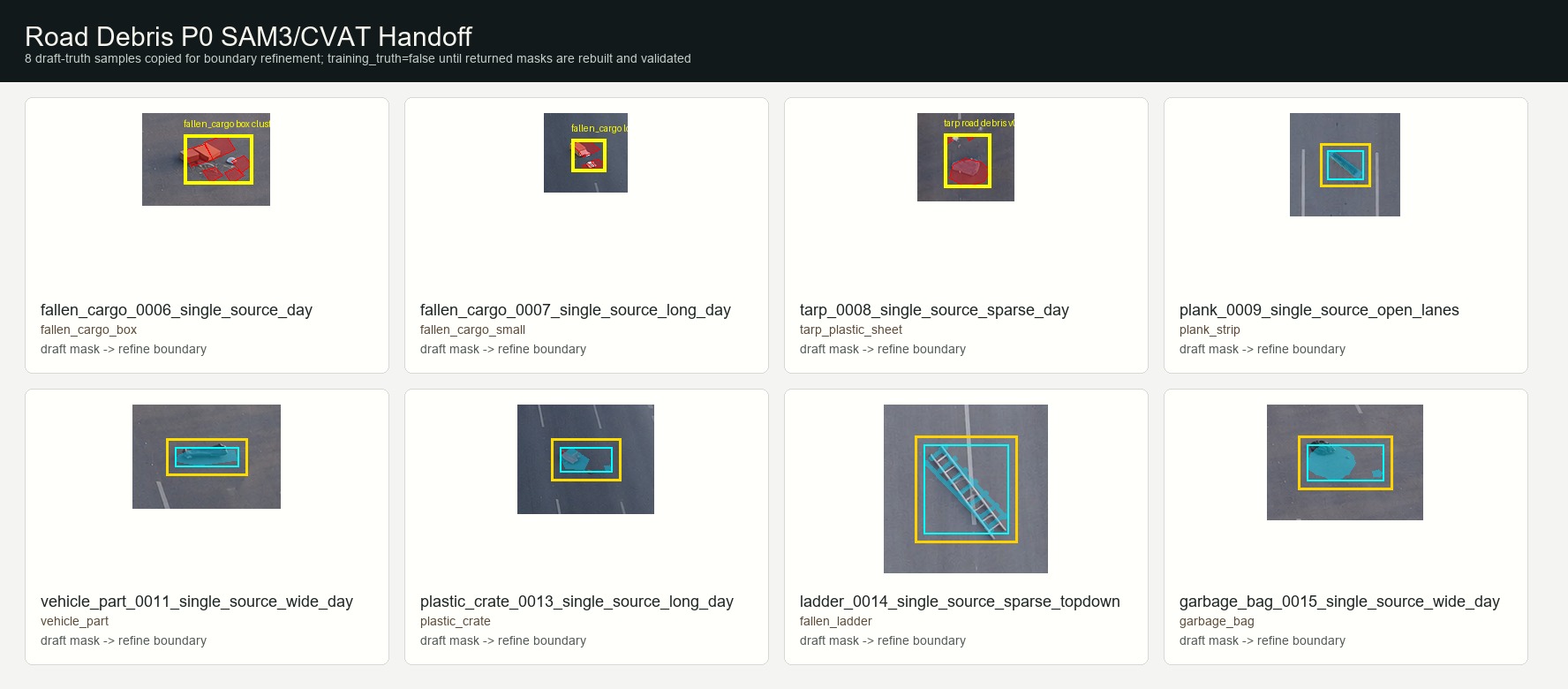
第二條 traffic lane 已進入 SAM3/CVAT 邊界修正。
我們停止盲目增量,先把 P0 8 張異物樣本做成 segmentation handoff。
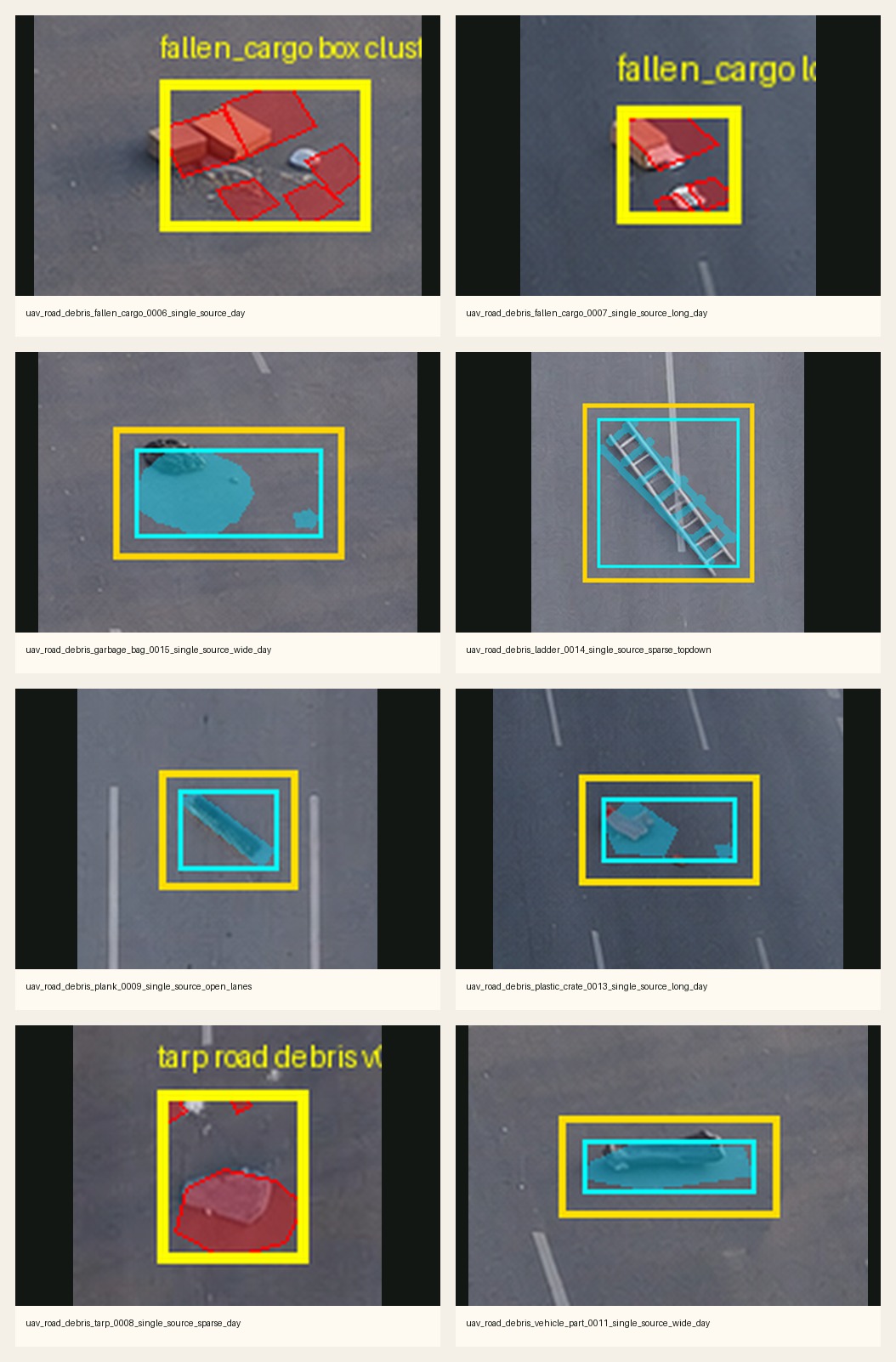
Road-debris ROI:8 張 P0 樣本已用 crop overlay 放大,方便 CEO 看清異物尺度與標注目標。
SVGE 不止交通事件,已擴到橋墩、邊坡、擋牆。
這些場景先以展示與 gate 驗證為主,只有通過 source-preserving 和 segmentation gate 才進訓練鏈路。
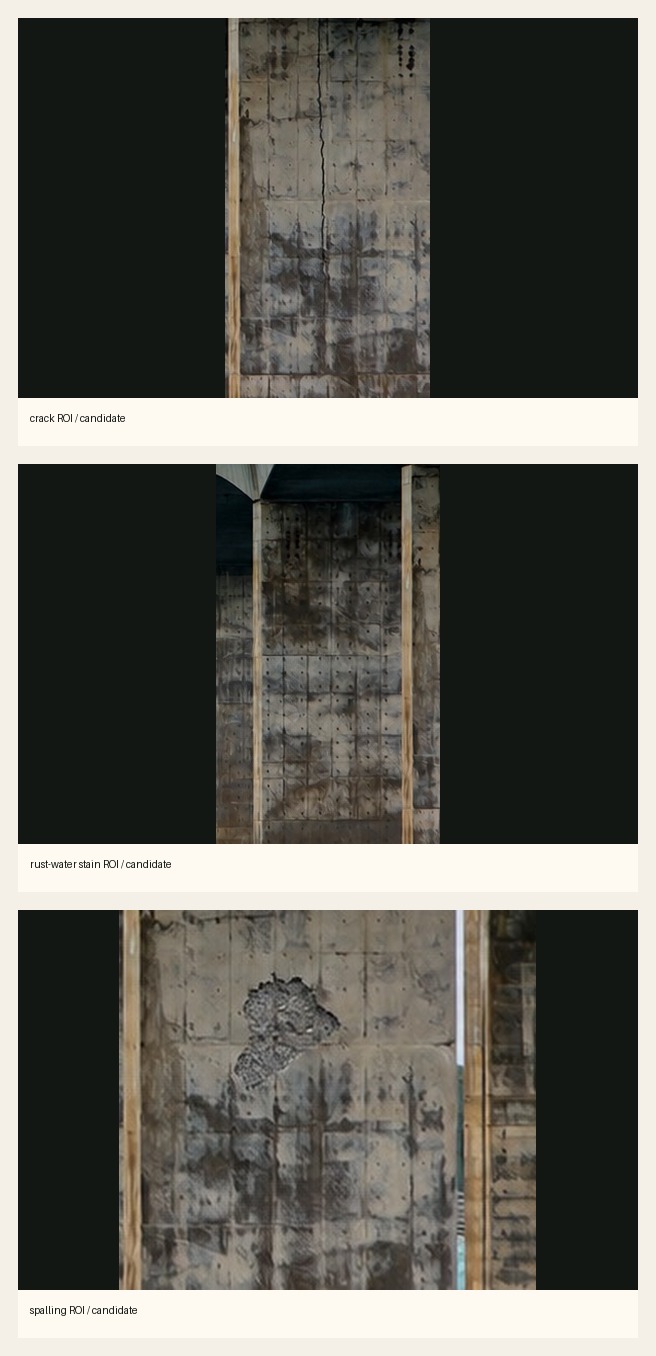
Bridge / pier ROI:三類維護缺陷用局部視角展示,避免在大橋全景中看不到裂縫、鏽水或剝落。
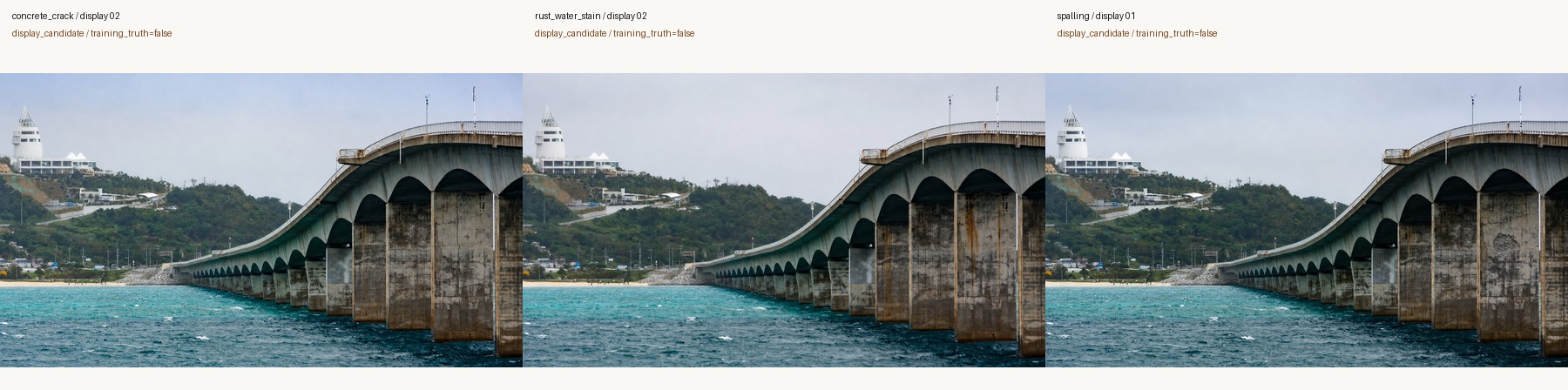
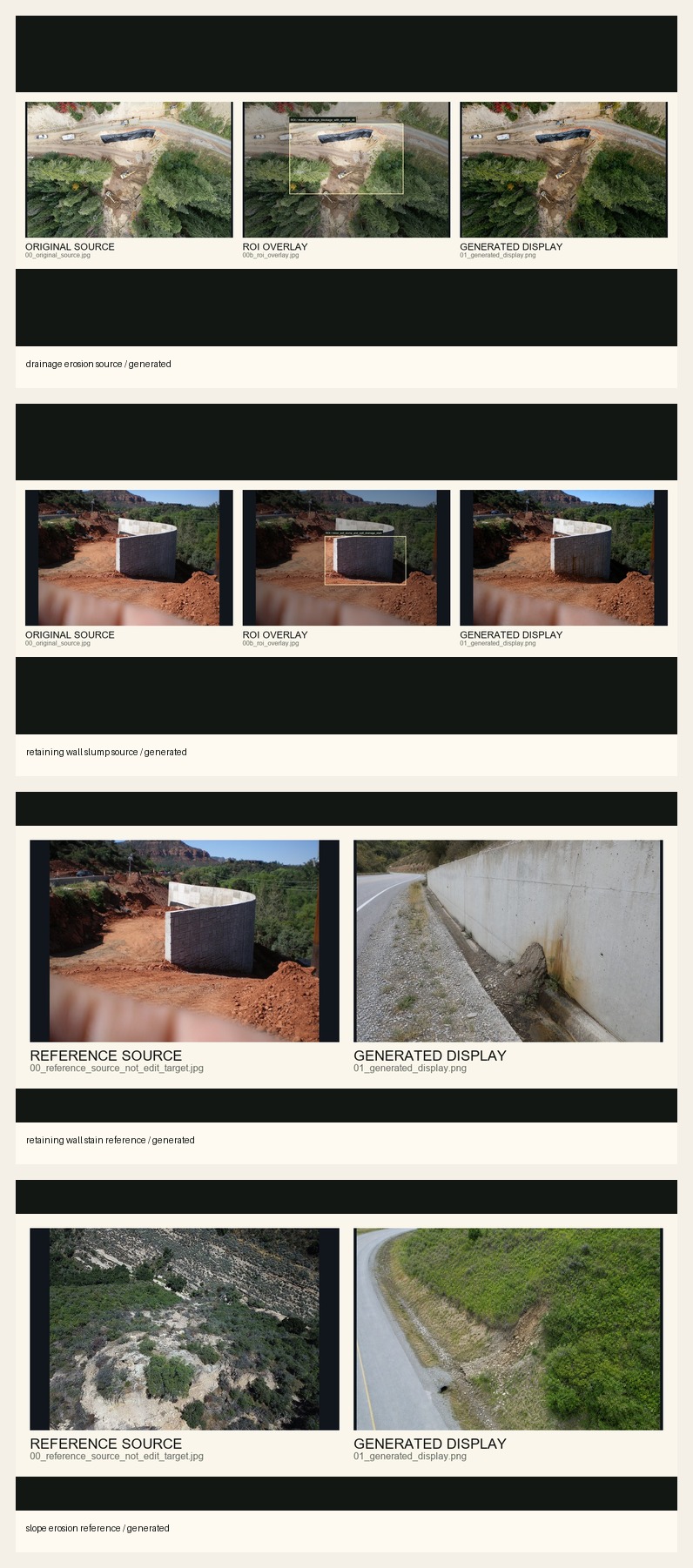
Slope / retaining-wall:原圖/參考圖與生成圖並排,重點放在排水、沖刷、擋牆污跡和邊坡維護語義。

核心競爭力是資料質量控制,不是單張圖生成。
每個事件都必須通過 visual gate、mask gate、JSON/YOLO 重建、QA overlay、batch validation。失敗案例被保留成方法邊界。
先定事件、場景、尺度、位置和不應生成的東西。
用 source-preserving 或 mask-first 路線生成候選圖。
從最終生成圖重建 mask / JSON / YOLO,不相信 prompt 原始意圖。
通過 overlay、crop、validator、smoke train 才能進入 batch。
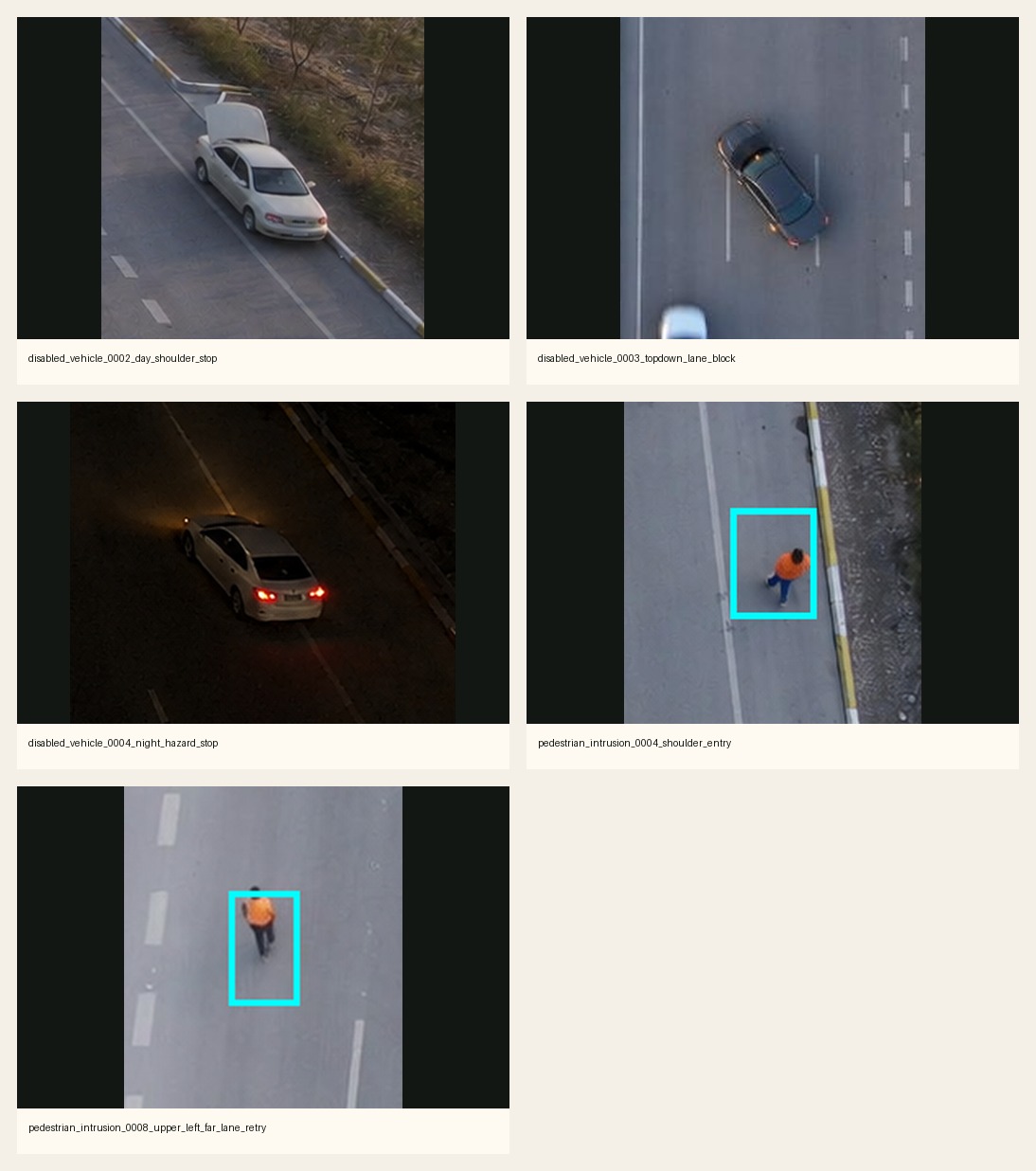
Disabled vehicle / pedestrian ROI:目前仍是 review / segmentation-needed,CEO 能看清我們正在處理的下一批交通事件。
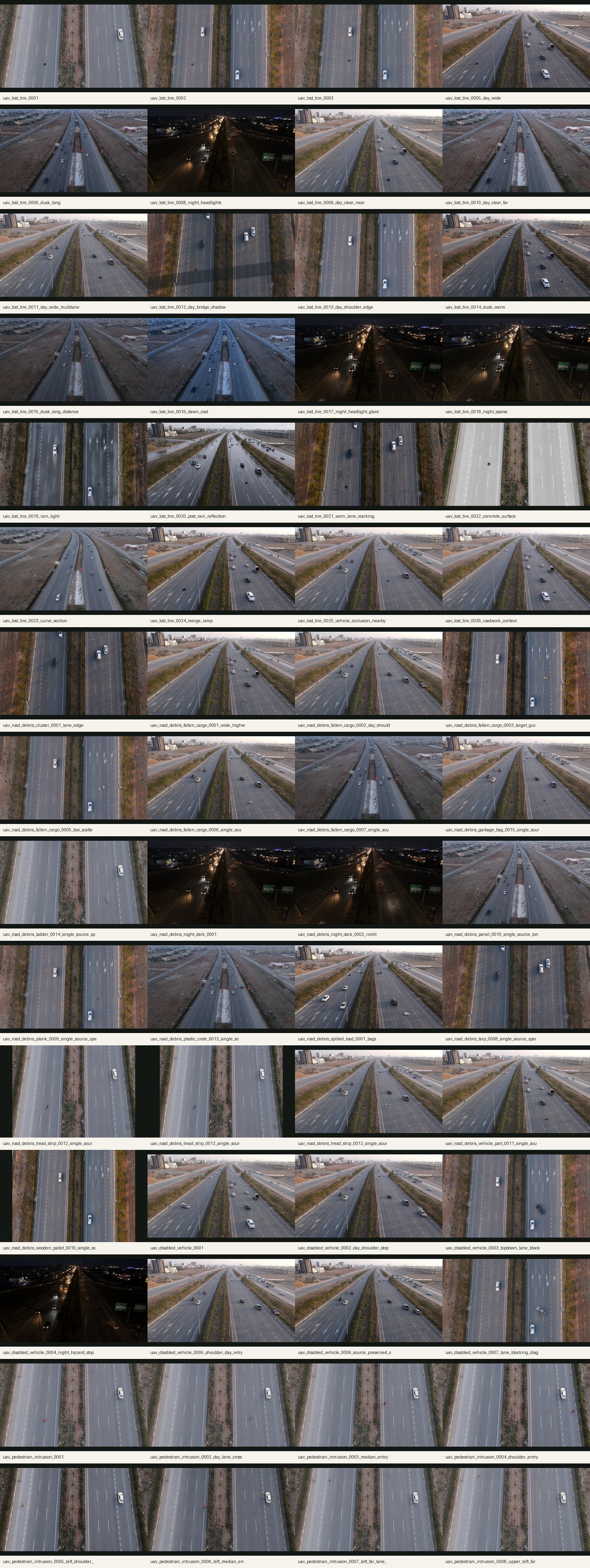
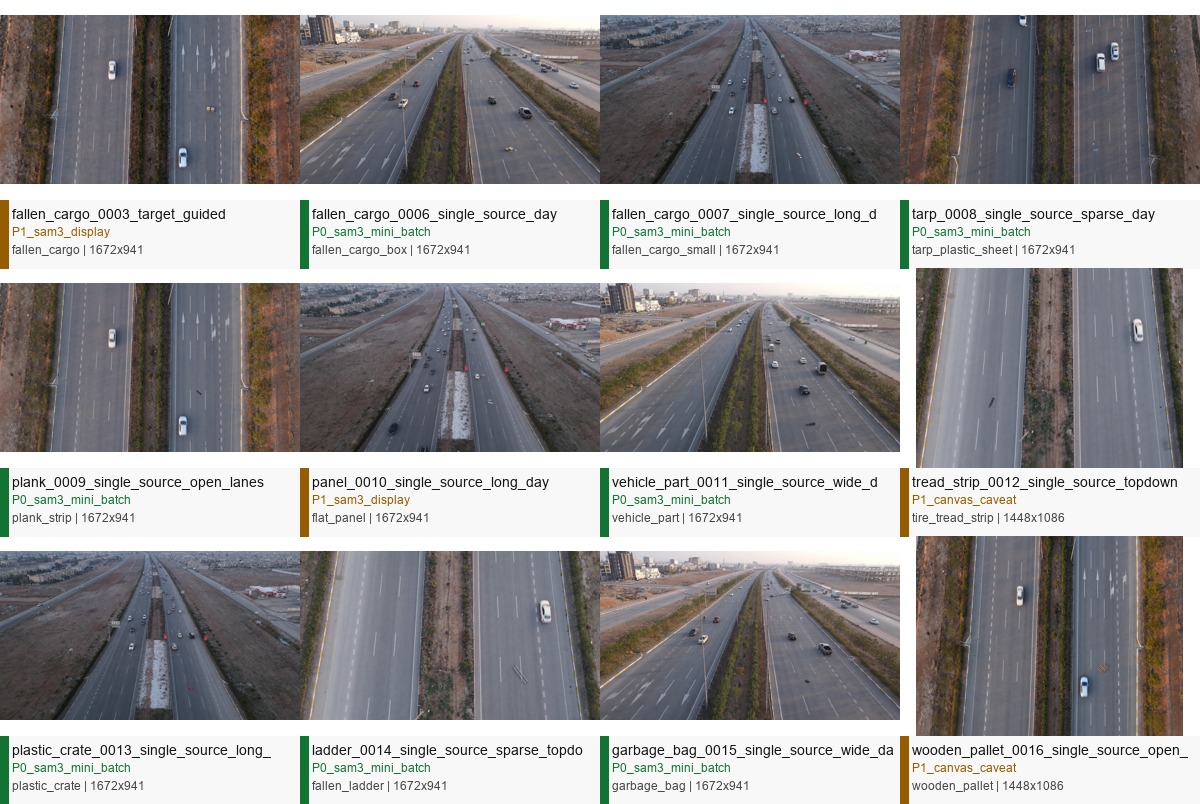
生成候選牆:包含 lost tire、road debris、disabled vehicle、pedestrian intrusion 等多事件樣本。
全圖已分類打包,CEO 看前台,同事查後台。
前台保留高信號成果;後台保留所有可追溯圖像、來源路徑、大小和 lane bucket。
下一步不是多做 demo,而是把兩條線產品化。
1. 以 lost tire batch 作為可訓練 proof;2. road-debris 走 SAM3/CVAT 邊界修正;3. bridge/slope 用 strict source-preserving 生成器和 segmentation gate 才能進 training truth。